NavFoM-银河通用推出的环视导航基座大模型
文章来源:智汇AI 发布时间:2025-11-06
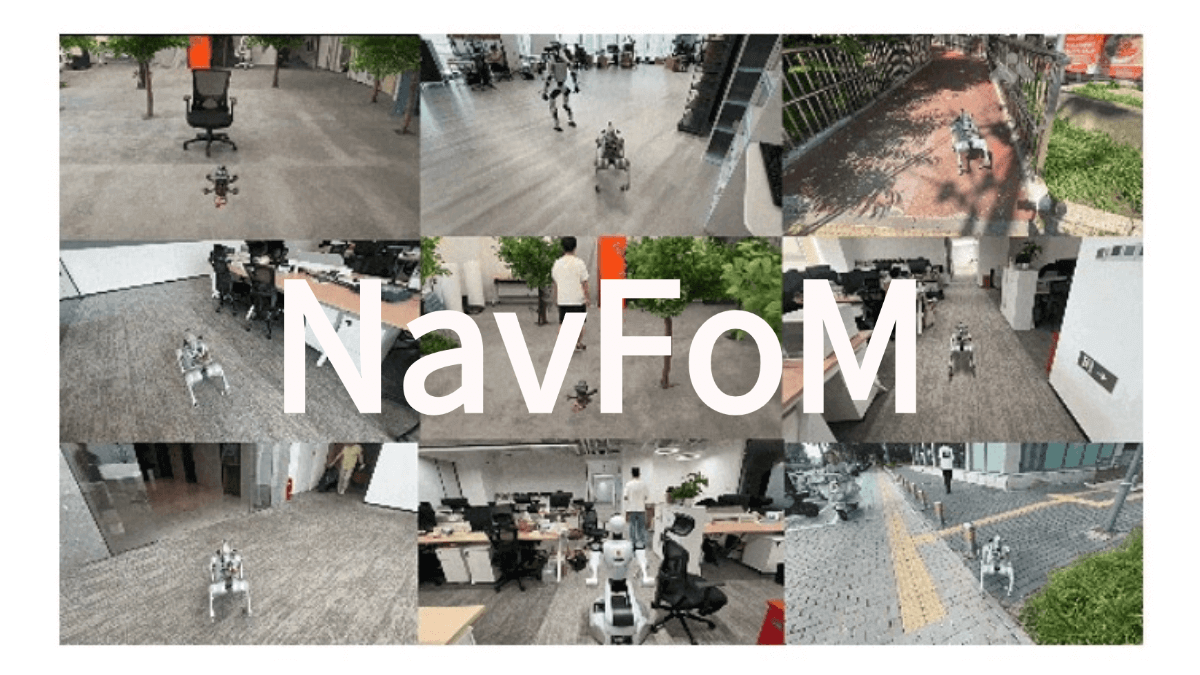
NavFoM(Navigation Foundation Model)是银河通用联合北京大学、阿德莱德大学、浙江大学等团队发布的全球首个跨本体全域环视导航基座大
暂无访问NavFoM是什么
NavFoM(Navigation Foundation Model)是银河通用联合北京大学、阿德莱德大学、浙江大学等团队发布的全球首个跨本体全域环视导航基座大模型。具备全场景支持能力,可同时适用于室内和室外环境,能在未见过的场景中实现零样本运行。NavFoM支持多种导航任务,如自然语言指令驱动的目标跟随和自主导航,能快速适配机器狗、轮式人形机器人、无人机、汽车等不同本体。核心技术包括TVI Tokens和BATS策略,建立了一个全新的通用范式:“视频流 + 文本指令 → 动作轨迹”,端到端地完成导航全过程。
NavFoM的主要功能
全场景支持:NavFoM能同时支持室内和室外场景,可在未见过的环境中实现零样本运行,无需额外的建图或数据采集,具有很强的环境适应性。相关推荐