DreamGen-英伟达推出的新型机器人学习技术
DreamGen是什么
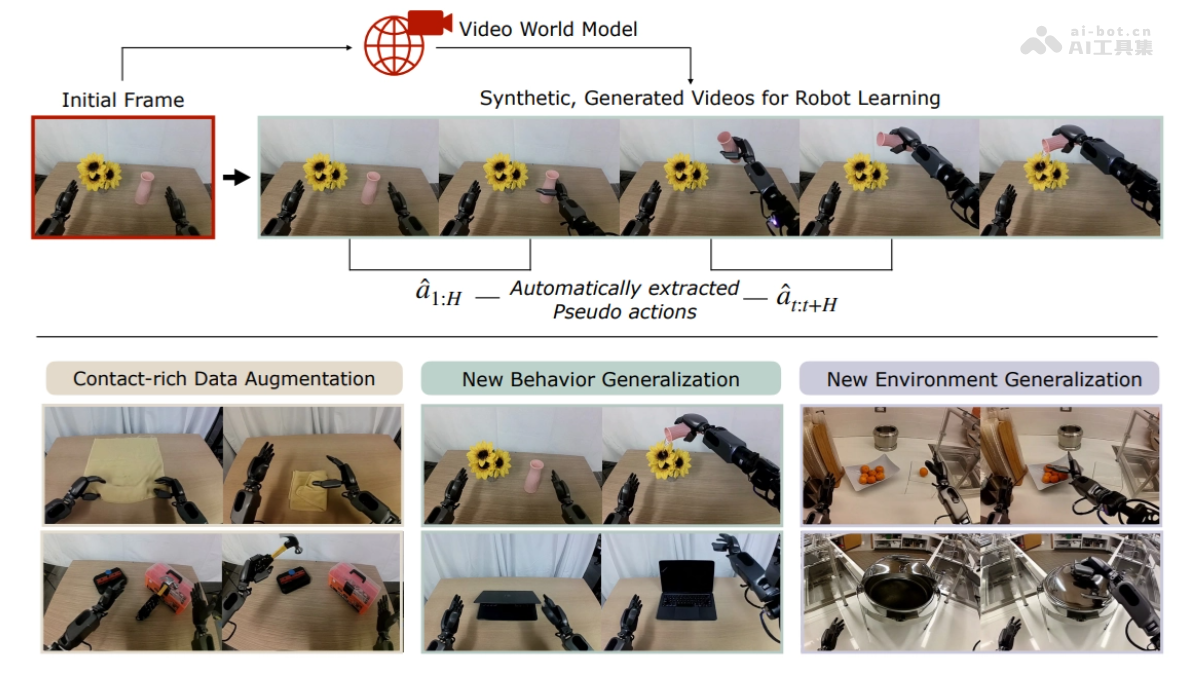
DreamGen是英伟达推出的创新的机器人学习技术,基于AI视频世界模型生成合成数据,让机器人能在梦境中学习新技能。DreamGen仅需少量现实视频数据,能生成大规模逼真的训练数据,实现机器人在新环境中的行为泛化和环境泛化。DreamGen的四步流程包括微调视频世界模型、生成虚拟数据、提取虚拟动作以及训练下游策略。DreamGen让机器人在没有真实世界数据支持的情况下,凭文本指令完成复杂任务,显著提升学习效率和泛化能力。
DreamGen是英伟达推出的创新的机器人学习技术,基于AI视频世界模型生成合成数据,让机器人能在梦境中学习新技能。DreamGen仅需少量现实视频数据,能生成大规模逼真的训练数据,实现机器人在新环境中的行为泛化和环境泛化。DreamGen的四步流程包括微调视频世界模型、生成虚拟数据、提取虚拟动作以及训练下游策略。DreamGen让机器人在没有真实世界数据支持的情况下,凭文本指令完成复杂任务,显著提升学习效率和泛化能力。
Copyright @ 智汇AI
联系方式QQ:3756153558 | 手机:17359272608 | 闽ICP备2024047188号-2 | 厦门点击创客网络科技有限公司
友情链接: 微米小说站 |
笔魂AI绘图 |
库宝ai工作助手 |
智搜AI导航站 |
快标书 AI |
AI吧 |
邢台医院 |
声动视界 |
文多多AIPPT |
HelpLook AI知识库 |
gitee AI |
笔格设计 |
AIBOX创作平台 |
08AI导航网 |
零导航 |
下载之家 |
教程之家 |
系统之家 |
天极网 |
曲多多版权音乐









